RobotC Coding

Activity 3.1.1
Activity 3.1.2



Activity 3.1.3




Activity 3.1.4

Conclusion Questions
3.1.1
1. The motors and sensors could take in data from the environment around them and can perform various functions.
2. I would sometimes forget to put the negative in front of the number so the motor did not turn the way i wanted it to if i wanted it to turn backwards but this is a tiny mistake.
3.1.2
1. Sometimes my mistakes were so tiny they were hard to tell.
2. These outputs could be used to separate the components while having them work together dependent on other sources.
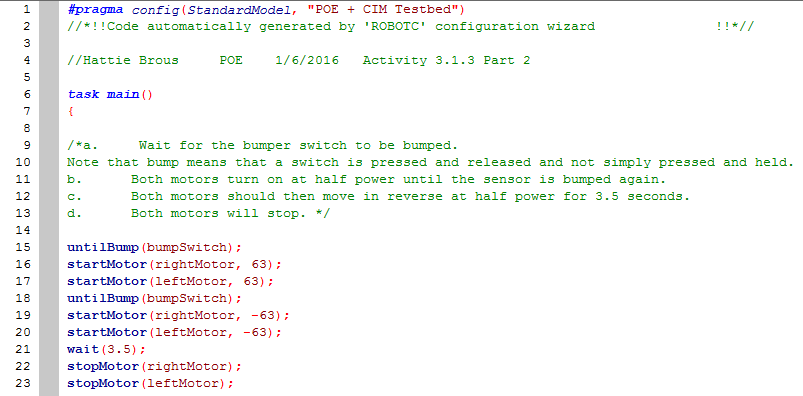
3.1.3
1. Commenting was still hard to get used to and I was still trying to figure out how.
2. The potentiometer that uses certain degrees, the light sensor and the amount of light, and the encoder which acted like a stopwatch.
3.1.4
1. The comments became difficult to word because the commands kept becoming more complex.
2. A system that has two separate outcomes with the stationary option based on more than one input.
1. The motors and sensors could take in data from the environment around them and can perform various functions.
2. I would sometimes forget to put the negative in front of the number so the motor did not turn the way i wanted it to if i wanted it to turn backwards but this is a tiny mistake.
3.1.2
1. Sometimes my mistakes were so tiny they were hard to tell.
2. These outputs could be used to separate the components while having them work together dependent on other sources.
3.1.3
1. Commenting was still hard to get used to and I was still trying to figure out how.
2. The potentiometer that uses certain degrees, the light sensor and the amount of light, and the encoder which acted like a stopwatch.
3.1.4
1. The comments became difficult to word because the commands kept becoming more complex.
2. A system that has two separate outcomes with the stationary option based on more than one input.

